
Free Community Tutorials
Great technology is supported by great people, and the Megamark is no exception. In these pages you'll find everything you need to become a Megamark developer. So why not start learning and join the community today? Our user base is enthusiastic and dedicated to spreading use of the software far and wide. Our community can help support the beginner, the expert, and adds to the ever-increasing knowledge base.
Great technology is supported by great people, and the Megamark is no exception. In these pages you'll find everything you need to become a Megamark developer. So why not start learning and join the community today? Our user base is enthusiastic and dedicated to spreading use of the software far and wide. Our community can help support the beginner, the expert, and adds to the ever-increasing knowledge base.
|
Talking Robot Face Tutorial in Processing
by Siyan Zhou, July 15, 2017 This tutorial introduces how to use Processing to build an animated and interactive talking robot face on your computer screen. It also covers some computer programming basics along the way. You will need to have Processing 3.0 installed on your computer for this tutorial.
| ||
|
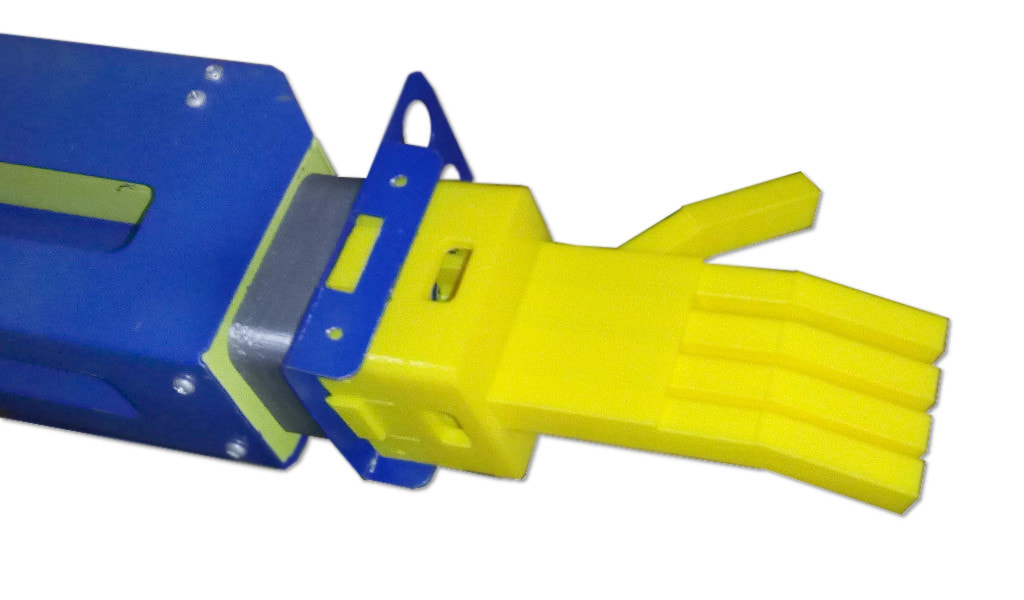
TinkerCAD Simple Hand Tutorial
by John Choi, January 1, 2018 TinkerCAD is a free, simple, online 3D design and 3D printing app for everyone by Autodesk. The purpose of this tutorial is to introduce you on how to use TinkerCAD and create a simple 3D printable hand for the Choitek Megamark robot.
| ||
|
14 Week Development Timeline
Designed for 14 sessions, 1-2 hours per session. This timeline is meant to showcase a sample implementation of how to integrate the Megamark robot with a Python and 3D printing STEM engineering course. Note that this timeline represents guidelines as opposed to rigid curricula, and as such is very flexible to changes. In addition, this timeline is only an estimate, and actual times may vary greatly depending on learning and development speed.
| ||

|
Installing Linux+Arduino on a Chromebook
by Andrew Zhang, January 1, 2017 A detailed guide on how to get full Linux running on Chromebooks to get the full functionality of the Megamark. The primary features needed for Chomebook compatibility are the ability to perform Arduino Serial communication and use Open Sound Control (OSC). The primary language to explore is Python 2.7 on the Chromebook.
| ||
|
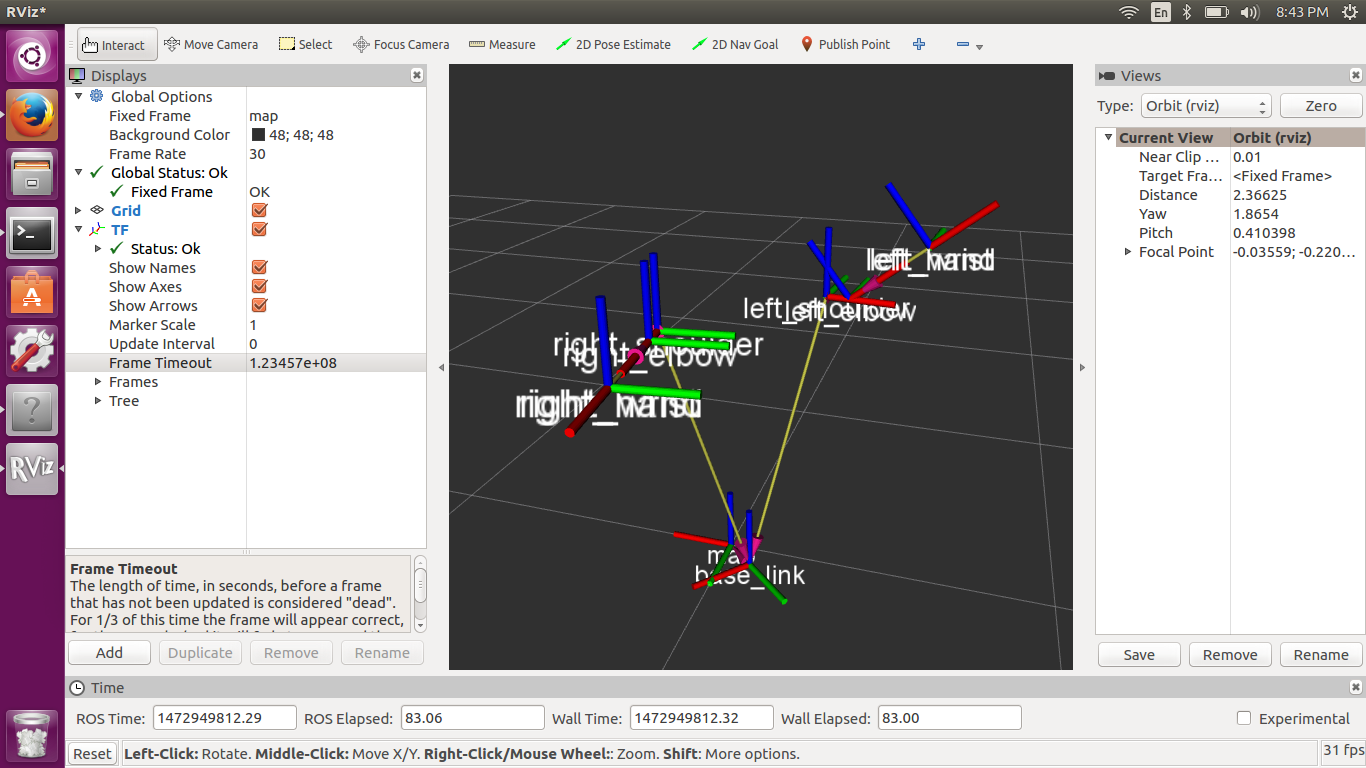
Advanced Tutorials with ROS
By Ian Holst, September 3, 2016 These are tutorials for advanced roboticists with a significant amount of experience in programming using ROS, the industry-standard robotics programming toolkit:
| ||||||||||

|
Beginner Tutorials with Python 2.7
By Yosser D'Avanzo, July 15, 2016 (Deprecated) These are a series of introductory tutorials for budding roboticists. A rudimentary understanding of basic programming principles is recommended:
| ||
Want to write tutorials for the Megamark? We'd love your help!
Connect with our team and join the community by emailing [email protected].
Connect with our team and join the community by emailing [email protected].